团队名称:电气与智能控制团队
成员介绍:史旭华(教授)、蓝艇(副教授)、周歆妍(副教授)、陈晓霞(副教授)、朱莹(副教授)、何杭锋(特聘副研究员)、秦莉(特聘副研究员)、徐青政(讲师)、李善志(讲师)
团队联系方式:13858286716;0574-87600945
团队研究方向(200字左右)及主要成果:
电气与智能控制团队的研究方向为系统建模与优化、智能感知与安全认证、无人系统自主控制。系统建模与优化方向针对连续和离散动态混杂的复杂系统,研究其模型建立方法,并在此基础上实现优化控制;智能感知与安全认证方向针对多模态传感器数据的普适计算和应用问题,研究信息融合方法和设备身份表征方法,用于设备状态感知与身份认证,以提高系统安全性;无人系统自主控制方向针对无人机和移动机器人等无人系统研究无人机的飞行控制、移动机器人的定位与导航控制等问题,解决了无人系统在实际应用中的自主智能控制问题。
一、系统建模与优化
针对连续动态和离散动态混杂的复杂系统,通过多模态理论将其建模为混杂系统,并面向此类混杂系统设计鲁棒控制、自适应控制、滑模控制等智能控制算法,使得控制算法能够应对系统的参数突变。进而,将该理论应用于网络化控制系统,将网络时延、数据丢包和网络攻击等导致的参数突变建模为混杂系统。通过观测器和滤波器技术,快速估计未知系统状态和模型特征,进而利用自适应算法和滑模算法设计补偿器,消除网络因素对控制系统的影响,并通过障碍函数优化控制系统暂态性能。在此基础上,通过设计和优化事件触发通信机制,降低控制系统对网络带宽的占用,并降低执行器能耗。
二、智能感知与安全认证
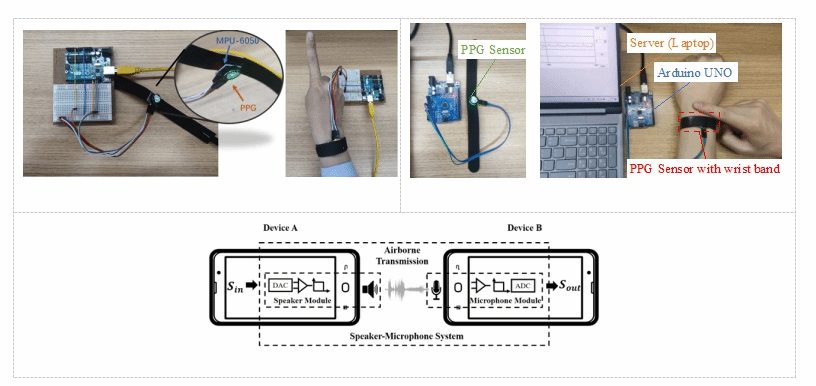
针对多模态传感器数据的普适计算和应用展开了一系列研究,应用场景包括智能终端安全接入机制、用户状态监测与健康评估、智能汽车感知安全等。在设备接入方面,针对设备数量多、先验知识少、计算能力有限的问题,研究了包括传感器特性、信号传输特性、环境表达特性在内的设备接入方法,提出了基于信号非线性作用的设备认证接入机制;在用户身份认证与状态评估方面,研究了有限传感器下的超限感知机理,探索了包括图像、PPG生物信号、声音信号等不同模态信号的用户身份表征方法,提出了基于针对不同设备类型的用户身份持续认证机制,以提高系统整体设备接入和用户访问的安全性。相关研究成果已经发表在IEEE Transactions on Mobile Computing, IEEE Sensors Journal, ACM Transactions on Sensor Networks等领域知名的国际期刊和IEEE INFOCOM、ICPADS、ICC等CCF推荐的国际会议上,并获得了3项国家发明专利授权。
三、无人系统自主控制
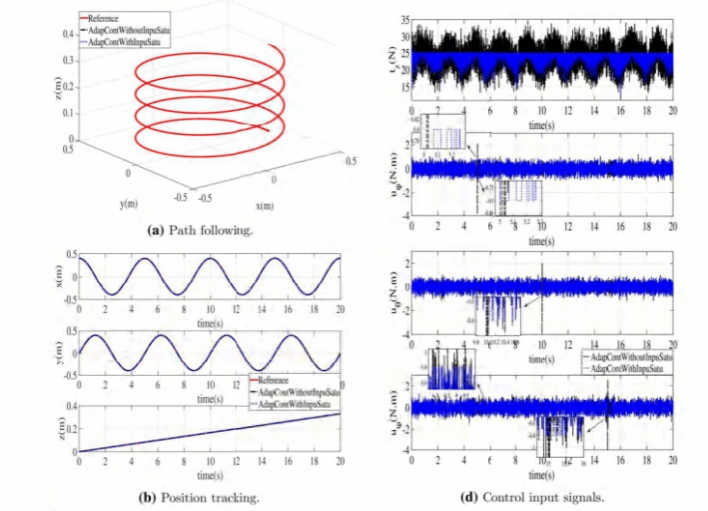
针对无人机的飞行控制,根据信息融合最优估计方法,将无人驾驶航空器系统所要求的性能指标及其系统动力学方程转换为关于控制输入的若干个信息方程,然后通过集中式的信息融合最优估计将这些信息方程进行融合从而直接得到近似最优控制输入。采用有限时间神经网络来近似系统未建模动态及外部未知风扰,同时结合有限时间反步法,获得控制器。相关研究成果发表在在AEROSPACE SCIENCE AND TECHNOLOGY和Nonlinear Dynamics等期刊上。
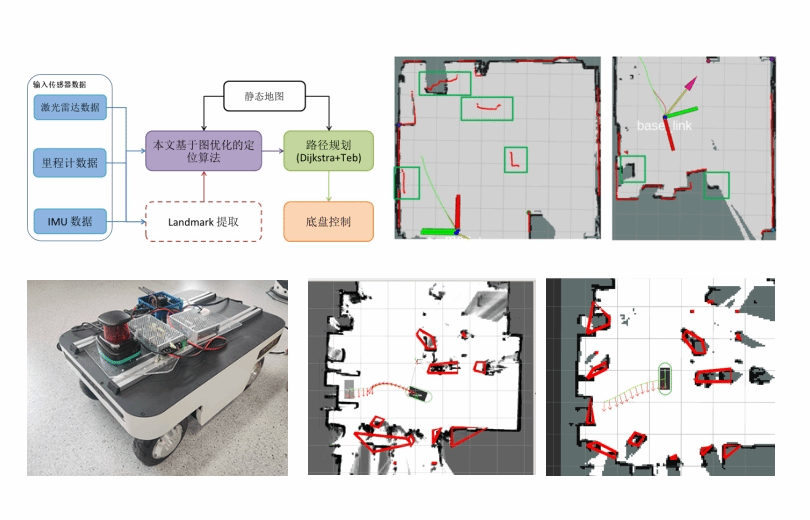
针对移动机器人在执行定位导航任务中激光雷达外参标定问题,研究Scan-to-Map匹配的激光雷达外参标定方法,通过改进激光雷达自身位姿估计求解和移动机器人里程计航迹推算来提高标定精度。针对定位问题,利用环境中建筑物结构特征(Landmarks)替代人工路标的定位方法,利用激光雷达传感器的扫描数据来提取环境中的建筑物结构特征,并添加到全局位姿优化过程中,提高移动机器人在复杂动态环境中的定位精度。针对四舵轮移动机器人,通过添加四舵轮约束、路径模式分段规划等方法,采用多模式时间弹性带算法MMTEB(Multi-Mode Timed Elastic Band),有效地发挥了四舵轮底盘的优势。